Jesús (un compañero de la universidad) y yo, después de un intento fallido de montar un minisumo, decidimos montar un minisumo por piezas, el cual había que montarlo todo, incluido el circuito, con vistas a una vez montado modificarlo y mejorarlo.
A continuación vamos a ver como se montó el robot.
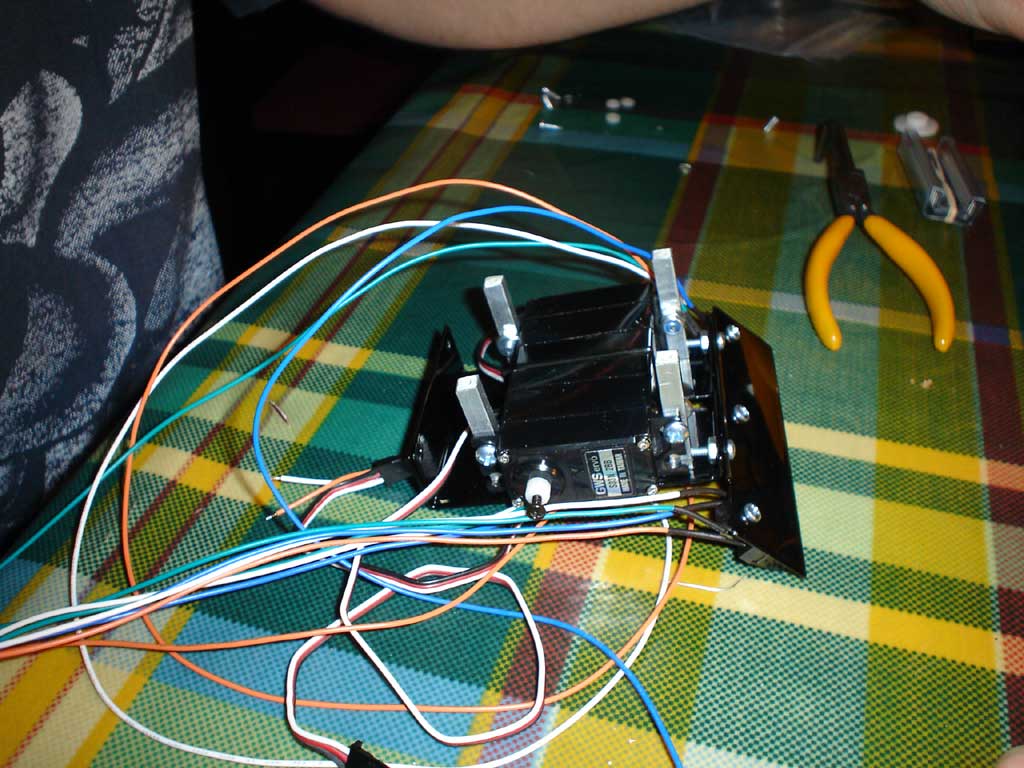
El robot estaría basado en servos (formados por un motor de corriente continua, una caja reductora y un circuito de control, permitiendo indicarle un ángulo y que pueda mantenerlo; se usan, por ejemplo, en el sistema de dirección de los coches de radiocontrol o en el aeromodelismo). En este caso, hay que modificarlo para que pueda dar mas de una vuelta completa, teniendo como ventajas, la fuerza y baja inercia que caracteriza a estos dispositivos, sin embargo, como desventaja , por lo comprobado en este caso, la velocidad a la hora de usarlo como sistema de tracción del robot. Una vez modificado el servomotor se atornillan a la base del minisumo:

Montaje de la base con los servomotores
Los sensores que leerán la línea blanca del borde del tatami (o pista de batalla) se encontrarán en una pequeña pala en la parte delantera:
Sensores de suelo y base
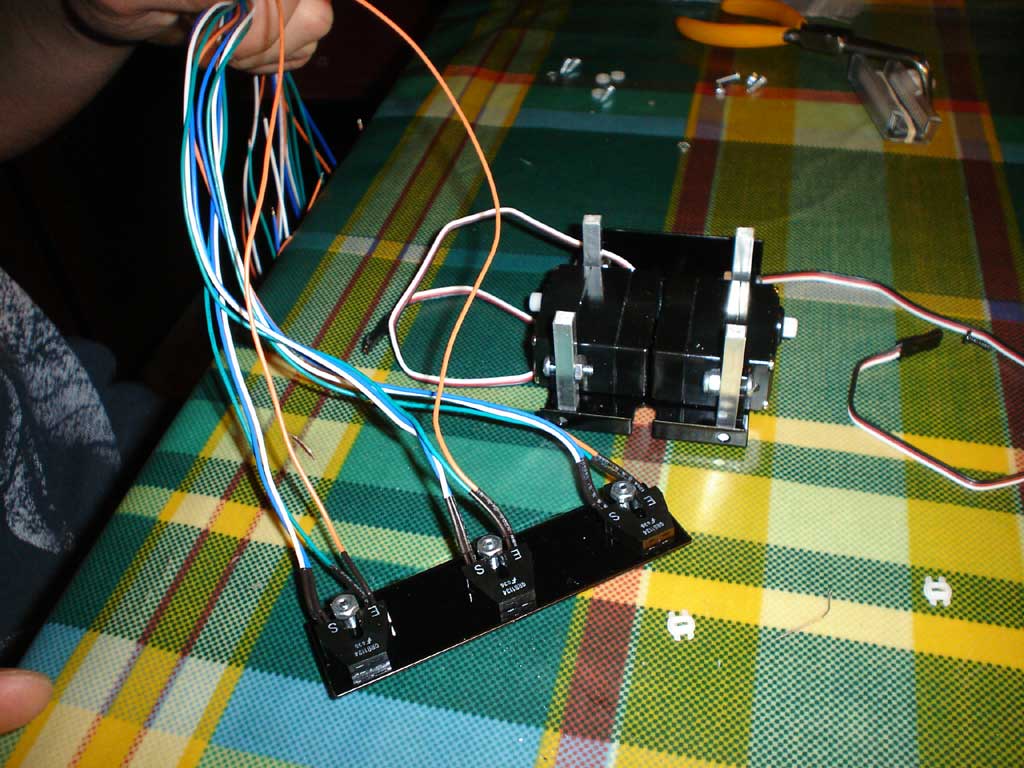
Pala con sensores de suelo
Ahora llega el momento de soldar los componentes a la placa principal del minisumo, placa que integra directamente el puerto serie para conectar directamente al ordenador y programarlo. Además no requiere de alimentación del puerto serie para programarlo, lo que nos permitirá programarlo con un cable USB – Serie en cualquier lugar con un portátil que no tenga directamente dicho puerto serie. Otra de sus ventajas es que la placa nos permitirá ampliar la memoria al PIC con una memoria EEPROM extra, que aunque nos pudimos hacer con ella unos días antes del concurso, tendría que esperar.

Colocando componentes antes de empezar a soldar

Placa base soldada
La alimentación del circuito irá así: por un lado, los sensores y el PIC con una pila de 9v, y por otro lado los servos con 4 pilas AA.
Montamos el circuito en el resto de la estructura:
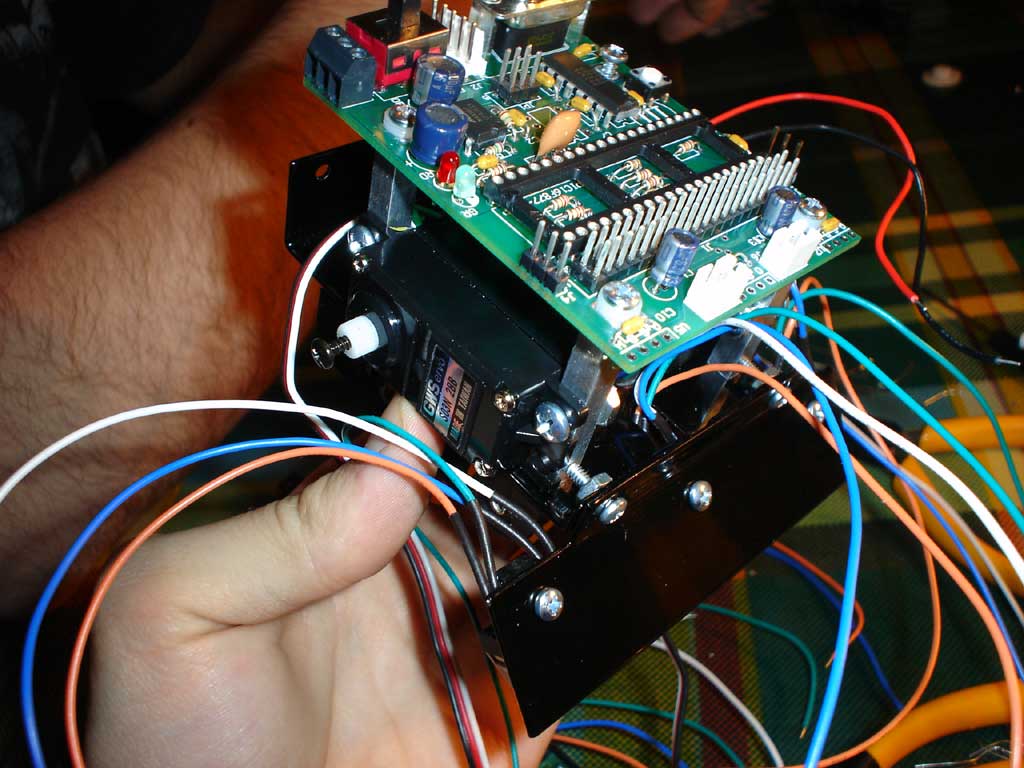
Base, placa base, y sensores de suelo
Acoplamos los sensores infrarrojos frontales y los conectamos a la placa del PIC.
Tras algunos problemas, a día de hoy no resueltos ni a día del concurso, relativos al circuito debido a la rápida descarga de la pila del PIC y que no logramos solucionar con polímetro en mano. Lo conectamos al ordenador por el puerto serie y previamente programado el PIC con «PICLoader» funcionando de la forma que podéis ver aquí:
Una vez que vemos que podemos programar el PIC: verificamos que los sensores se pueden leer correctamente, y la programación del minisumo en si (en ASM).
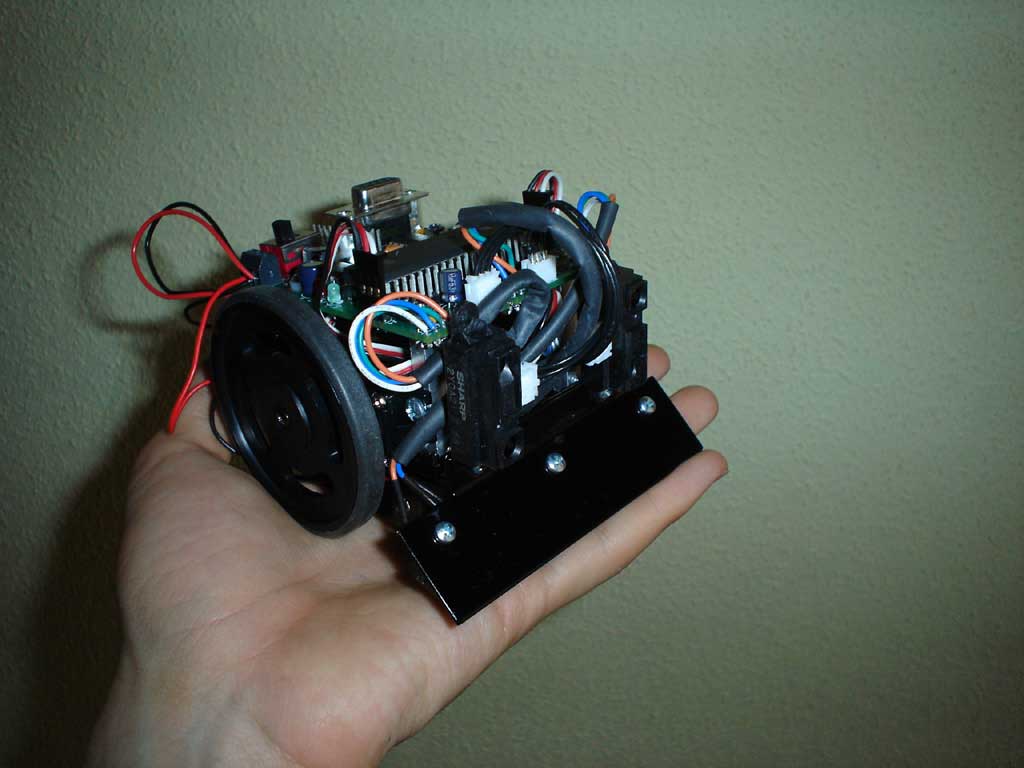
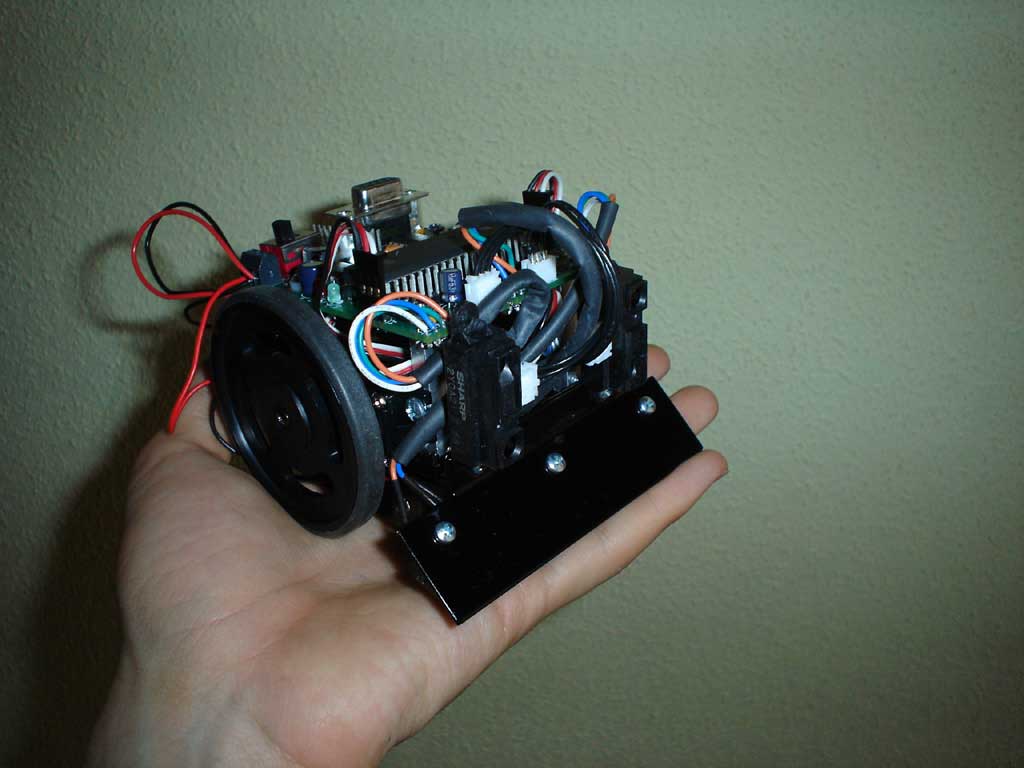
Robot terminado