En la universidad surgió un curso de iniciación a la microbótica gracias a Amuva (Asociación de Microbótica de la Universidad de Valladolid). Donde te enseñaban a montar la versión mas simple de un robot rastreador y que podría concursar en Robolid. La categoría de rastreadores son robots que se encargan de seguir una línea negra en el menor tiempo posible, los robots que te enseñaban a montar en el curso no son muy rápidos puesto que su tracción está basada en servomotores trucados.
No pude tomar fotografías durante su montaje, por ello, le he desmontado parcialmente para que podáis ver cada una de sus partes.
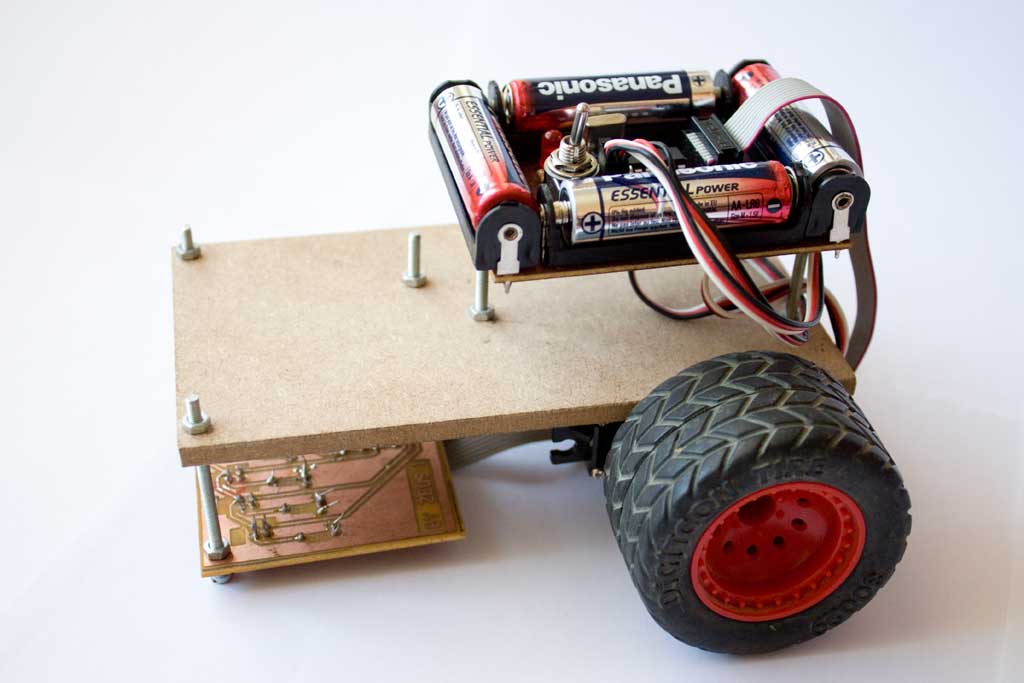
El robot está formado por una placa controladora, una placa de sensores CNY y 2 servomotores.
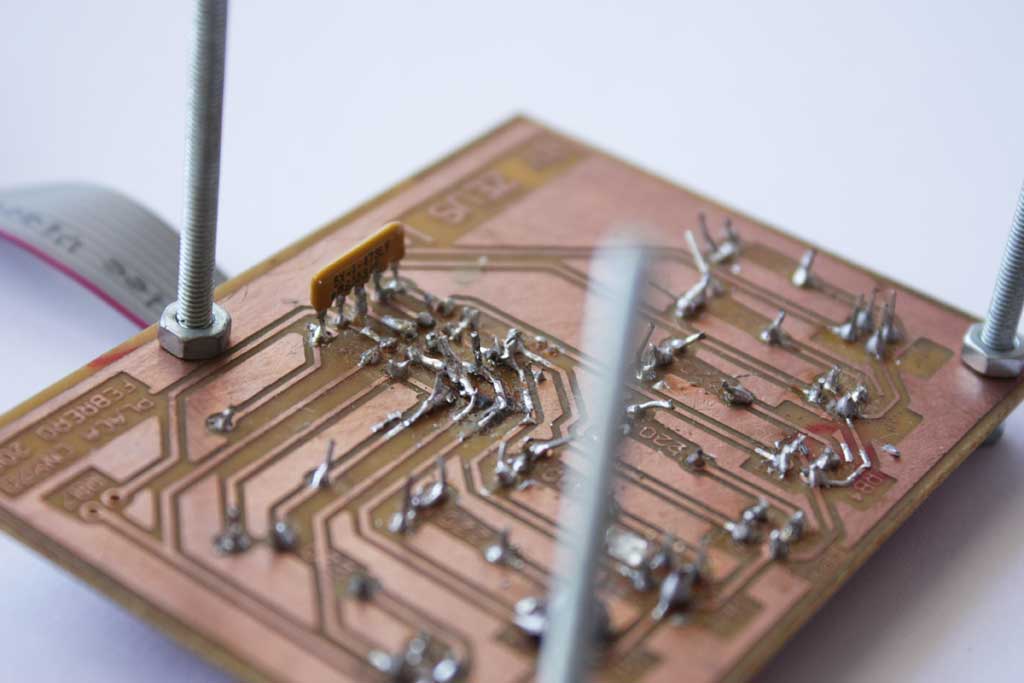
Ambas placas son caseras y nos las dieron en el curso hechas. Nosotros tuvimos que lijarlas, taladrarlas y soldar todos los componentes.
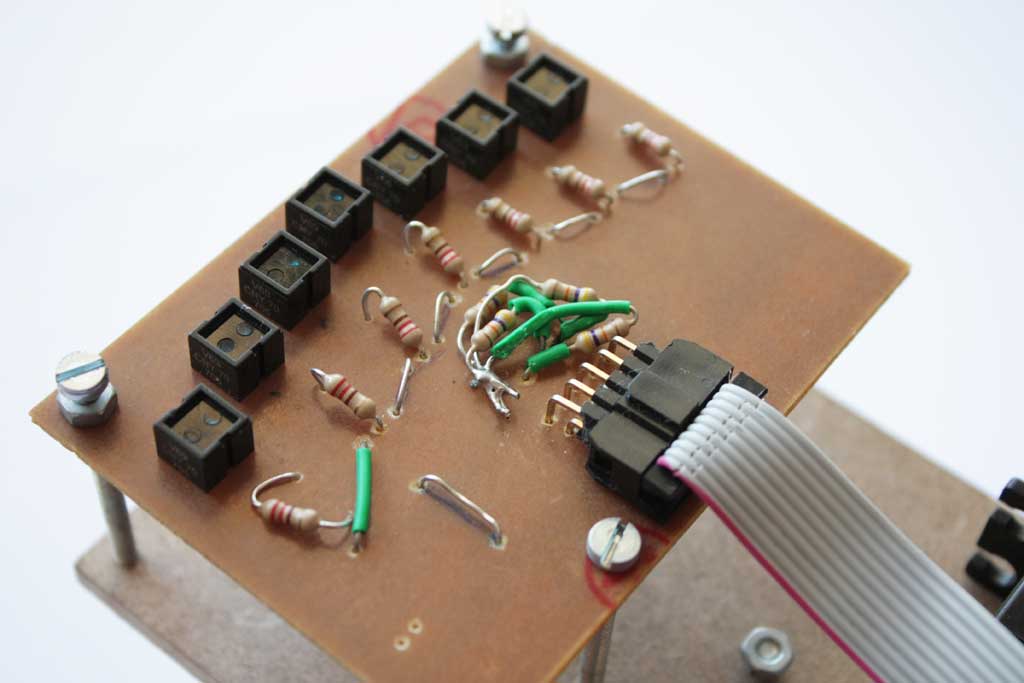
La placa controladora está formada con un microcontrolador de la marca Microchip, modelo PIC 16F84A con salidas y entradas digitales. La circuiteria es la mínima especificada en el datasheet (página 24) del PIC 16F84Apara poderlo hacer funcionar correctamente, dando como entradas la de los sensores y dos de sus salidas a los servos.
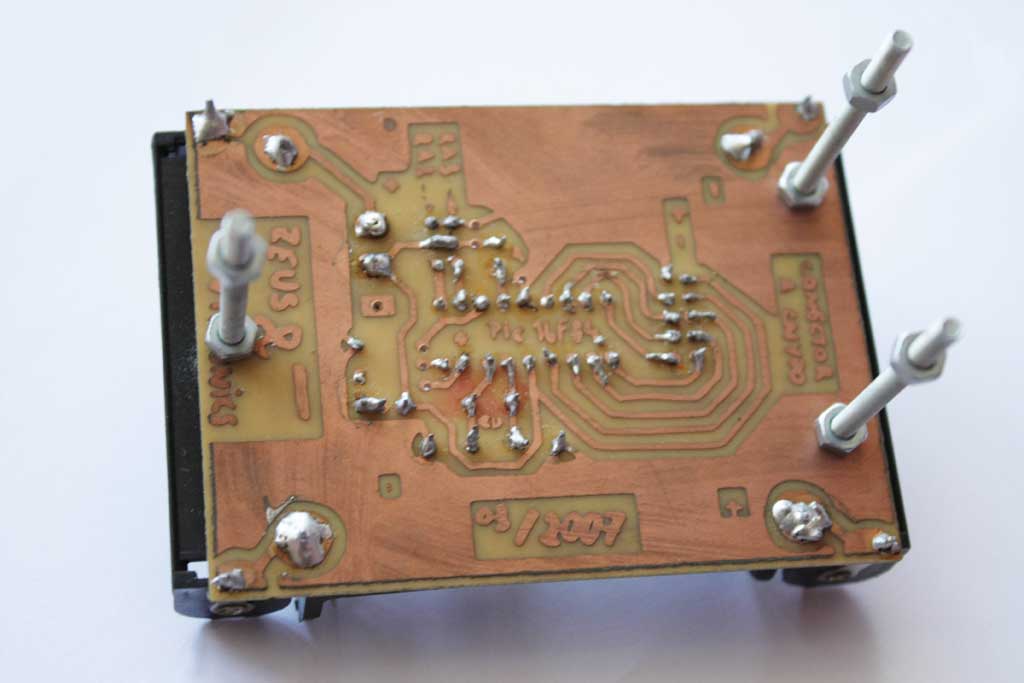
Parte posterior de la placa casera

Placa controladora ya soldada
La tracción del robot está formada por dos servomotores trucados, donde en el curso nos enseñaron a desarmarlos y trucarlos, para que pueda dar mas de una vuelta de 180 grados; las ruedas, aunque en el curso se hacía con dos CDs con el canto con goma (la que se usa para análisis clínicos) pegada, yo decidí ponerle unas ruedas de un coche de juguete (no se si para bien o para mal…:S).
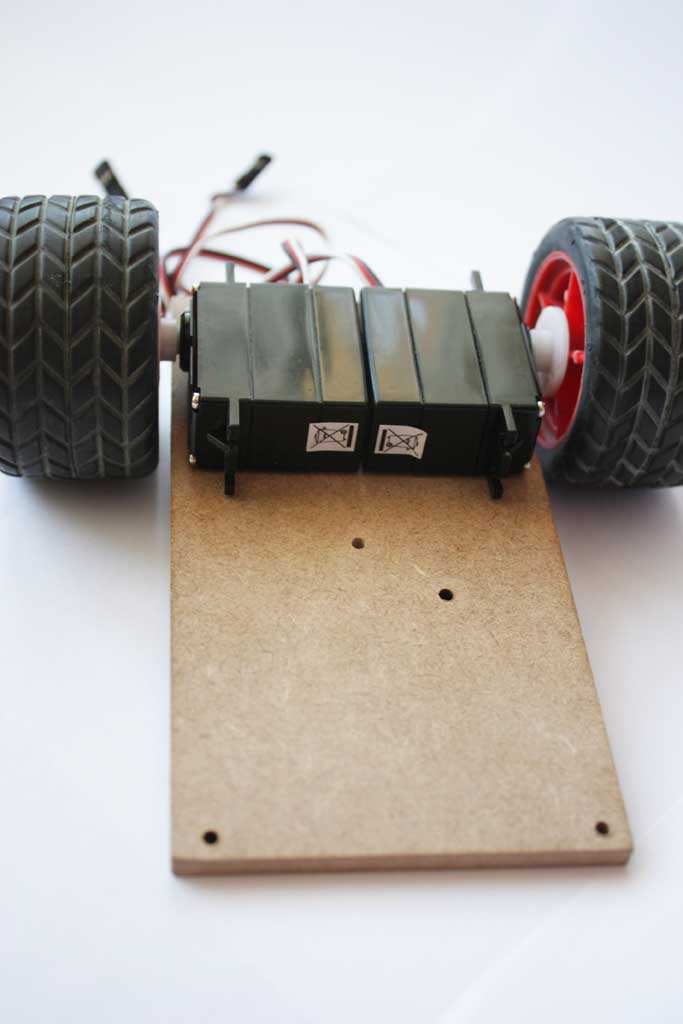
Servomotores trucados para el robot
Los sensores son sensores infrarrojos que se encargan de localizar la línea devuelven una señal digital (un «1» en forma de 5 voltios si ven algo y un «0» si no ven nada).
Sensores infrarrojos de suelo CNY70
Placa que aglutina los sensores de suelo CNY70
Y el momento interesante es cuando, mediante un programa almacenado en el microcontrolador, dotemos de esa «inteligencia» a toda la construcción del robot que le diga cual es su tarea. Dicho programa se encarga de ver por los 7 sensores consiguiendo seguir la línea por un método que podríamos llamar de «trayectoria por compensación», es decir, si voy bien, muevo los motores por igual hasta que se desvie, cuando detecte los sensores de los lados la línea, el robot compensará la trayectoria del lado que se desvió hasta que el robot vea la línea totalmente centrada gracias al sensor central. Al tener varios sensores por cada lado podemos tener una aproximación del grado de giro que hay que hacer para compensar la trayectoria y evitar que tiemble mucho y vaya aún mas lento porque hace demasiadas «eses» sobre la línea.
Para programarlo en el curso había un único programador para todos los del curso, y claro esa dependendía me hizo mirar como hacerme con un programador para poder programar mi robot con calma. El programador TE-20 (esquemas en la red) permite, conectándolo a un puerto serie (RS-232) del ordenador, programar microcontroladores PIC 16F84A, 16F877 y una EPROM 24CXX. Yo me hice con dicho programador en una tienda de electrónica de Valladolid, la pega, es que te daban la placa prefabricada sin componentes soldados y tenias que poner absolutamente todos. Al final la jugada me salió por unos 9 euros aproximadamente, soldado y listo funcionó sin problemas.

Programador TE20

Programador TE20
Tengo un vídeo que unos compañeros nos grabaron cuando lo presentamos en Robolid 2007 que, en cuanto tenga un rato, prometo subir a Youtube (aunque la calidad sea algo patética jejeje)